
Всего два года назад крошечный робот-скат-манта стал самым быстроплавающим роботом с мягким телом в мире. Что ж, один из его потомков теперь побил этот рекорд – и он использует меньше энергии, чем его предшественник, к тому же.
Оригинальный робот длиной 22,8 мм был разработан доц. Профессор Цзе Инь и его коллеги из Университета штата Северная Каролина.
Он имел два гибких полиэфирных крыла, похожих на скатов-манта, которые на самом деле были левым и правым концами единой изогнутой бистабильной конструкции. Бистабильность означает способность натянутой структуры оставаться в любом из двух положений, не требуя для этого никакой энергии. Заколка для волос является хорошим примером бистабильной структуры.
Государственный университет Северной Каролины
Середина бистабильной конструкции крыла робота была зажата между верхним и нижним пневматическими приводами из мягкого силикона.
Когда воздух был накачан в верхний привод, он прогнулся вверх и потянул середину конструкции крыла, заставив ее «защелкнуться» в положение, при котором оба крыла опустились вниз. Когда верхний привод был сдут и нижний один был надут, конструкция щелкнула в противоположном направлении, снова подняв крылья. Механизм продемонстрирован в следующем видео.
Мягкий робот-пловец, похожий на баттерфляй, быстрый и эффективный.
Активируя таким образом два привода вперед и назад (с помощью внешнего воздушного насоса), можно было взмахивать крыльями достаточно быстро, чтобы средняя скорость плавания составляла 3,74 длины тела в секунду. По словам ученых, это было примерно в четыре раза быстрее, чем ранее было возможно для мягкотелых плавающих роботов.
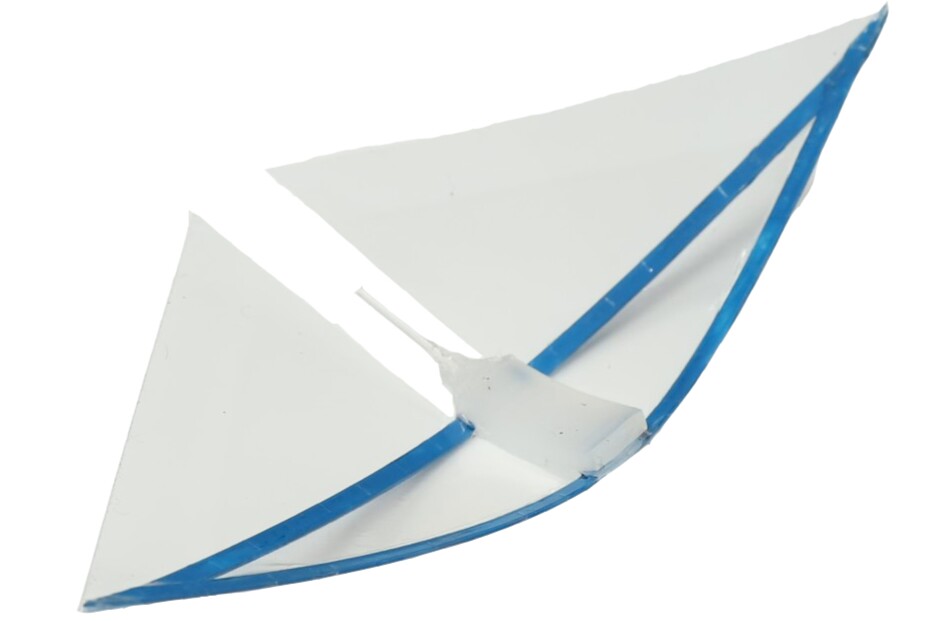
В длине 68 мм новый robo-manta, Инь и его команда отказались от бистабильной конструкции вместе с нижним приводом. Гибкая конструкция крыла теперь моностабильна, то есть она всегда будет возвращаться только в одно положение — изогнутое посередине с крыльями вверх — когда не подается энергия.
Хайтао Цин, Государственный университет Северной Каролины
При надувании одинарный верхний пневматический привод сгибается вниз и тянет вниз середину конструкции крыла, заставляя крылья щелкнуть вниз. Однако, как только приводу позволено сдуться, упругая восстанавливающая сила конструкции заставляет его вернуться в исходное положение, при этом вытягивая крылья вверх.
Таким образом, в то время как оригинальному роботу приходилось тратить время и силы на поочередное надувание/сдувание двух приводов за цикл взмахов крыльев вверх и вниз, новому боту достаточно активировать только один. Это улучшение дает роботу среднюю скорость плавания, составляющую колоссальные 6,8 длины тела в секунду, при этом он потребляет в 1,6 раза меньше энергии, чем оригинал.
Хайтао Цин, Государственный университет Северной Каролины
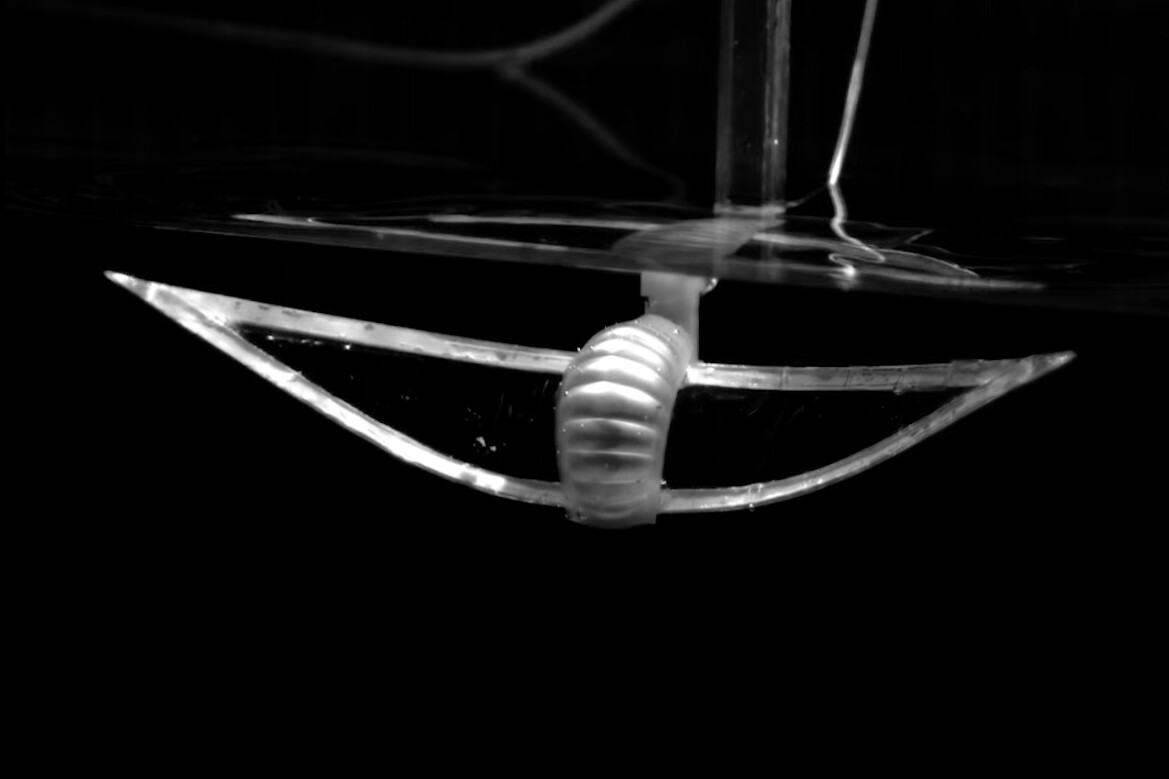
Кроме того, новый дизайн позволяет боту перемещаться вертикально в толще воды, просто изменяя скорость плавания.
«Когда плавники робота находятся в состоянии покоя, воздушная камера пуста, что снижает плавучесть робота. А когда робот медленно машет плавниками, плавники чаще находятся в состоянии покоя», — говорит аспирант Хайтао Цин, первый автор исследования. . «Другими словами, чем быстрее робот взмахивает плавниками, тем больше времени наполняется воздушная камера, что делает его более плавучим».
В настоящее время ученые работают над методом бокового управления роботом с прицелом на будущие применения, такие как исследование океана и наблюдение за водной дикой природой. Увидеть, как это происходит, можно на видео ниже.
Статья об исследовании была недавно опубликована в журнале. Достижения науки.
Быстрые и маневренные мягкие плавающие роботы, вдохновленные скатами манты



.jpg)










